No, there isn’t a constant output, but the time averaged output of the system when working in time proportional mode can be constant. To look at it another way, in steady state conditions, the amount of energy put into the building per hour is constant and therefore the temperature is constant. In steady state conditions this is what the TPI controller achieves, a time averaged heating output that balances the heat loss to give a constant temperature. As you say there will be small temperature variations between heating cycles but the long term average will generally be more accurate than a simple on/ off thermostat.If the boiler is being turned off, even for a short time, there can't be a constant output, so there will inevitably be a change in temperature in the house.
Quoting from the Honeywell homexpert web site FAQ:
How does TPI Control work?
A thermostat operates using a fixed number of firing periods per hour (normally selected to suit the appliance and system). This can often mean a thermostat can fire the boiler even when the set temperature is reached.
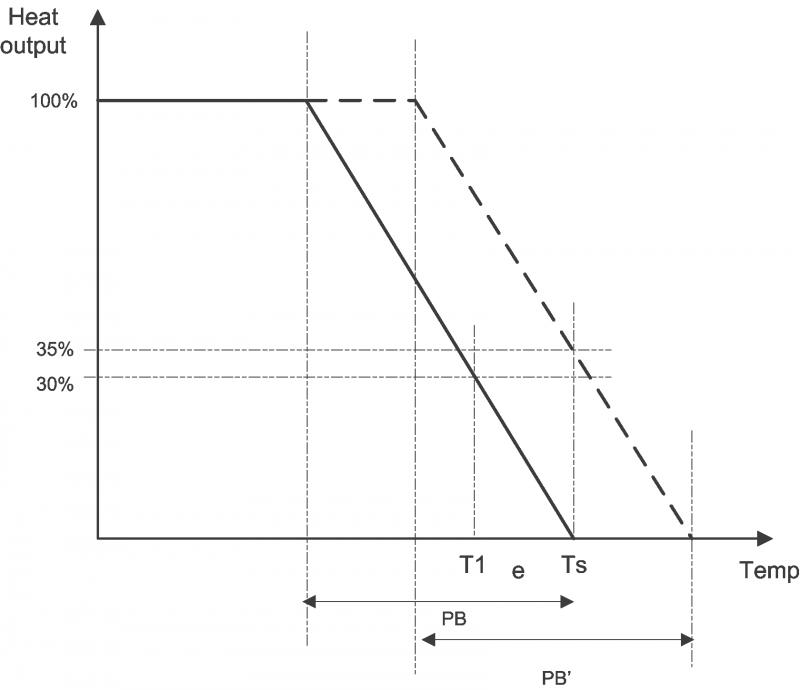
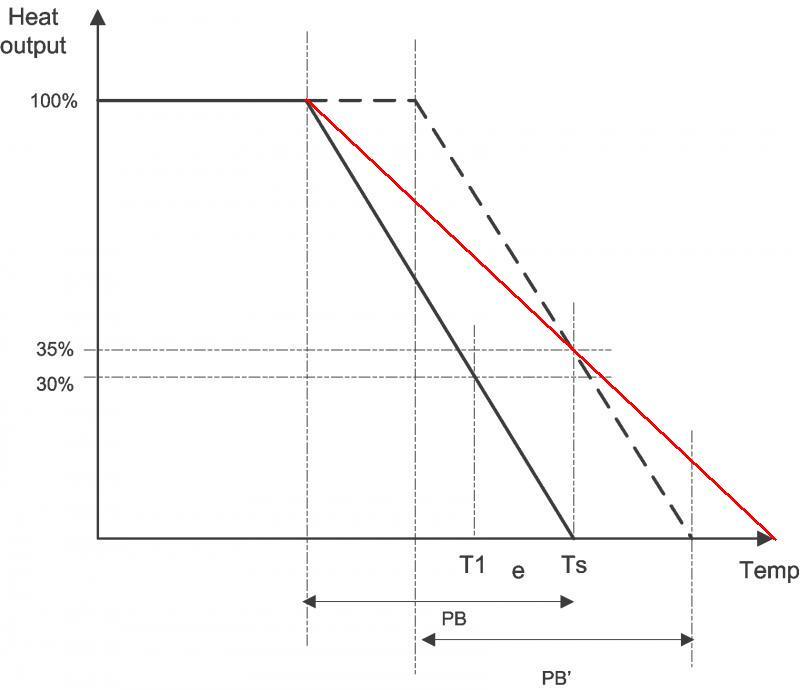
A TPI room thermostat will have 100% demand when the system first calls for heat. When the room temperature approaches the set point, it then calculates how many minutes are required within each firing period to satisfy the set temperature. The TPI thermostat will then reduce the firing time in that cycle period in proportion with the demand. This means that as the room temperature approaches set point, the boiler is fired progressively less.
See also: http://www.transcat.com/PDF/PIDControl.pdf
I don't see why you should make those assumptions. There is a minimum firing time (normally one minute). So if there is a 10 minute cycle and the ON period is less than 10% the boiler should still fire for one minute.
I suspect that if the ON period is between, say 5%, and 10% the boiler will fire for one minute and below 5% it will not fire at all. This is based on the fact that my system can go for over 10 minutes without the boiler firing at all.
I agree, this is quite possibly what it does. So, when the heating demand is low (mild outside), the controller may be dropping out of the proportional band and then back in when the temperature drops. This could explain operation seen by the OP where the heating stays off for a long period and the temperature drops perceptibly, because the controller is not operating in the PI control band.